новости бизнеса
работа для химиков
химические выставки
электронный справочник
авторефераты
форум химиков
контакты
|
новости науки новости бизнеса работа для химиков химические выставки |
каталог ресурсов электронный справочник авторефераты форум химиков |
о нас контакты |
|
||
| поиск |
|
|||||||||||||||||||||||
| Notice: Undefined variable: goo in /var/www/chemport.ru/data/www/chemport.ru/chemical_encyclopedia.php on line 109 Notice: Undefined variable: mn in /var/www/chemport.ru/data/www/chemport.ru/chemical_encyclopedia.php on line 109 i | Notice: Undefined variable: goo in /var/www/chemport.ru/data/www/chemport.ru/chemical_encyclopedia.php on line 109 Notice: Undefined variable: mn in /var/www/chemport.ru/data/www/chemport.ru/chemical_encyclopedia.php on line 109 Кодированные переменные | Notice: Undefined variable: goo in /var/www/chemport.ru/data/www/chemport.ru/chemical_encyclopedia.php on line 109 Notice: Undefined variable: mn in /var/www/chemport.ru/data/www/chemport.ru/chemical_encyclopedia.php on line 109 Отклик y | |
| Notice: Undefined variable: goo in /var/www/chemport.ru/data/www/chemport.ru/chemical_encyclopedia.php on line 109 Notice: Undefined variable: mn in /var/www/chemport.ru/data/www/chemport.ru/chemical_encyclopedia.php on line 109 x1 | Notice: Undefined variable: goo in /var/www/chemport.ru/data/www/chemport.ru/chemical_encyclopedia.php on line 109 Notice: Undefined variable: mn in /var/www/chemport.ru/data/www/chemport.ru/chemical_encyclopedia.php on line 109 x2 | ||
| Notice: Undefined variable: goo in /var/www/chemport.ru/data/www/chemport.ru/chemical_encyclopedia.php on line 109 Notice: Undefined variable: mn in /var/www/chemport.ru/data/www/chemport.ru/chemical_encyclopedia.php on line 109 1 | Notice: Undefined variable: goo in /var/www/chemport.ru/data/www/chemport.ru/chemical_encyclopedia.php on line 109 Notice: Undefined variable: mn in /var/www/chemport.ru/data/www/chemport.ru/chemical_encyclopedia.php on line 109 -1 | Notice: Undefined variable: goo in /var/www/chemport.ru/data/www/chemport.ru/chemical_encyclopedia.php on line 109 Notice: Undefined variable: mn in /var/www/chemport.ru/data/www/chemport.ru/chemical_encyclopedia.php on line 109 + 1 | Notice: Undefined variable: goo in /var/www/chemport.ru/data/www/chemport.ru/chemical_encyclopedia.php on line 109 Notice: Undefined variable: mn in /var/www/chemport.ru/data/www/chemport.ru/chemical_encyclopedia.php on line 109 y1 |
| Notice: Undefined variable: goo in /var/www/chemport.ru/data/www/chemport.ru/chemical_encyclopedia.php on line 109 Notice: Undefined variable: mn in /var/www/chemport.ru/data/www/chemport.ru/chemical_encyclopedia.php on line 109 2 | Notice: Undefined variable: goo in /var/www/chemport.ru/data/www/chemport.ru/chemical_encyclopedia.php on line 109 Notice: Undefined variable: mn in /var/www/chemport.ru/data/www/chemport.ru/chemical_encyclopedia.php on line 109 - 1 | Notice: Undefined variable: goo in /var/www/chemport.ru/data/www/chemport.ru/chemical_encyclopedia.php on line 109 Notice: Undefined variable: mn in /var/www/chemport.ru/data/www/chemport.ru/chemical_encyclopedia.php on line 109 - 1 | Notice: Undefined variable: goo in /var/www/chemport.ru/data/www/chemport.ru/chemical_encyclopedia.php on line 109 Notice: Undefined variable: mn in /var/www/chemport.ru/data/www/chemport.ru/chemical_encyclopedia.php on line 109 y2 |
| Notice: Undefined variable: goo in /var/www/chemport.ru/data/www/chemport.ru/chemical_encyclopedia.php on line 109 Notice: Undefined variable: mn in /var/www/chemport.ru/data/www/chemport.ru/chemical_encyclopedia.php on line 109 3 | Notice: Undefined variable: goo in /var/www/chemport.ru/data/www/chemport.ru/chemical_encyclopedia.php on line 109 Notice: Undefined variable: mn in /var/www/chemport.ru/data/www/chemport.ru/chemical_encyclopedia.php on line 109 + 1 | Notice: Undefined variable: goo in /var/www/chemport.ru/data/www/chemport.ru/chemical_encyclopedia.php on line 109 Notice: Undefined variable: mn in /var/www/chemport.ru/data/www/chemport.ru/chemical_encyclopedia.php on line 109 + 1 | Notice: Undefined variable: goo in /var/www/chemport.ru/data/www/chemport.ru/chemical_encyclopedia.php on line 109 Notice: Undefined variable: mn in /var/www/chemport.ru/data/www/chemport.ru/chemical_encyclopedia.php on line 109 y3 |
| Notice: Undefined variable: goo in /var/www/chemport.ru/data/www/chemport.ru/chemical_encyclopedia.php on line 109 Notice: Undefined variable: mn in /var/www/chemport.ru/data/www/chemport.ru/chemical_encyclopedia.php on line 109 4 | Notice: Undefined variable: goo in /var/www/chemport.ru/data/www/chemport.ru/chemical_encyclopedia.php on line 109 Notice: Undefined variable: mn in /var/www/chemport.ru/data/www/chemport.ru/chemical_encyclopedia.php on line 109 + 1 | Notice: Undefined variable: goo in /var/www/chemport.ru/data/www/chemport.ru/chemical_encyclopedia.php on line 109 Notice: Undefined variable: mn in /var/www/chemport.ru/data/www/chemport.ru/chemical_encyclopedia.php on line 109 -1 | Notice: Undefined variable: goo in /var/www/chemport.ru/data/www/chemport.ru/chemical_encyclopedia.php on line 109 Notice: Undefined variable: mn in /var/www/chemport.ru/data/www/chemport.ru/chemical_encyclopedia.php on line 109 y4 |
Значения физических переменных, соответствующие матрице, выбранной для реализации опытов, рассчитывают по формуле:

При числе опытов в ПФЭ, значительно превышающем число определяемых параметров модели, применяют так называемые дробные реплики (или дробный факторный эксперимент -ДФЭ), которые представляют собой часть плана ПФЭ. ДФЭ может содержать половину, четверть и т.д. опытов от ПФЭ. Соответственно различают полуреплики (qm-1), четвертьреп-лики (qm-2) и т. п. В общем случае ДФЭ м. б. обозначен как qm-l, где l-дробность реплики. К матрице ДФЭ предъявляют те же требования, что и к матрице ПФЭ. Планы, полученные с использованием ПФЭ или его дробных реплик, в которых переменные варьируются на двух уровнях, наз. линейными либо планами 1-го порядка, т.к. при их применении можно построить уравнение модели, включающее исследуемые факторы лишь в 1-й степени.
Насыщ. планы используют, если мат. модель предполагается в виде полинома (уравнения регрессии) 1-го порядка, общий вид которого может быть представлен выражением:

где y-отклик, b0 и bj-параметры модели. В качестве насыщенных планов наиболее часто применяют планы ДФЭ.
Алгоритм выделения значимых факторов в этом случае включает следующие этапы:
1) по формуле определяют параметры мат. модели.

2) По результатам параллельных опытов вычисляют дисперсию воспроизводимости, характеризующую разброс значений отклика. Например, при проведении r параллельных опытов в одной точке факторного пространства:

где

3)По формуле определяют дисперсию каждого параметра.

4) Для оценки точности найденных значений параметров, а также полученной мат. модели используют статистические критерии соотв. Стьюдента (t-критерий) и Фишера (F-кри-терий). При этом количественными мерами служат так называемая доверительная вероятность b или уровень значимости p= 1 — b и число степеней свободы f, то есть число экспериментов за вычетом числа констант, рассчитываемых по результатам этих опытов. Число констант определяется видом выбранной дисперсии; например, в случае дисперсии воспроизводимости по результатам параллельных опытов находят величину  , поэтому fb = r — 1. При заданных требованиях на точность результатов измерений доверительная вероятность (уровень значимости) определяет надежность полученной оценки. Значения указанных критериев табулированы и приводятся в спец. литературе.
, поэтому fb = r — 1. При заданных требованиях на точность результатов измерений доверительная вероятность (уровень значимости) определяет надежность полученной оценки. Значения указанных критериев табулированы и приводятся в спец. литературе.
5) Значимость каждого фактора проверяют оценкой значимости соответствующего параметра, т.к. вклады факторов в значение отклика пропорциональны значениям параметров. Для оценки их значимости рассчитывают соответствующее значение t-критерия по формуле:

Полученное значение сравнивают с табличным tT, найденным на предыдущем этапе. При выбранной доверительной вероятности параметр считается значимым, если tbi. > tT. В противном случае параметр незначим и соответствующий фактор можно исключить из построенной математической модели.
Сверхнасыщенные планы используют, если на процесс может влиять большое число факторов и их взаимодействий. Наиболее часто с целью уменьшения их числа применяют метод случайного баланса, позволяющий вместо ПФЭ и ДФЭ применять эксперименты, в которых значения факторов распределены по уровням случайным образом (рандомизированы). Метод имеет высокую разрешающую способность (возможность выделять сильно влияющие факторы), но малую чувствительность (то есть способность выделять значимые параметры модели, характеризующие факторы, которые имеют относительно слабое влияние). Используют также метод последовательного отсеивания: все изучаемые факторы на основе априорной информации подразделяют на группы, каждую из которых в дальнейшем рассматривают как отдельный комплексный фактор. В зависимости от полученной при этом информации остальные факторы снова разбивают на группы и выполняют новый цикл расчетов.
Аппроксимационные задачи. Для учета нелинейностей объекта исследований его мат. описание часто получают в виде полинома 2-го порядка, который в общем виде выражается формулой:

Напр., полином 2-го порядка для двух факторов записывается следующим образом:

Для нахождения параметров таких моделей недостаточно варьирования значений факторов на двух уровнях, поскольку нелинейность не может быть определена двумя точками. Поэтому для указанных моделей обычно применяют так называемые композиционные планы, включающие изменения факторов более чем на двух уровнях, что позволяет использовать их для построения моделей порядка выше первого. Общий алгоритм решения аппроксимационной задачи включает этапы.
1) Выбирают число существенных факторов, их средние значения и интервалы варьирования-эта информация может быть получена после проведения отсеивающего эксперимента или на основании знаний и интуиции исследователя.
2) Строят матрицу плана-на начальном этапе исследования в зависимости от числа факторов выбирают, как правило, планы 1-го порядка (ПФЭ или ДФЭ).
3) Рандомизируют опыты - для уменьшения влияния систематических ошибок опыты проводят в условиях, соответствующих строкам матрицы плана, выбираемым в случайном порядке (целесообразность такого приема подтверждена на практике).
4) Обрабатывают полученные результаты - рассчитывают параметры и составляют уравнение регрессии, оценивают значимость параметров и проверяют адекватность (т.е. соответствие) полученной математической модели имеющимся экспериментальными данным. Для проверки адекватности модели анализируют разность между опытными значениями и значениями отклика, предсказанными по полученной математической модели в разных точках факторного пространства. В качестве последних могут быть взяты как точки плана (при ненасыщенных планах), так и дополнительные точки. Последние обычно выбирают в области, представляющей наибольший интерес, либо располагают таким образом, чтобы полученные результаты можно было использовать для построения более точной модели высокого порядка.
5) Принимают решение о дальнейших действиях: если на этапе 4 получено адекватное уравнение регрессии, вывод аппроксимационной зависимости на этом заканчивают; в противном случае выясняют причину неадекватности и проводят новую серию экспериментов с использованием планов 1-го порядка (уменьшают интервалы варьирования факторов, включают в мат. модель новый фактор и т.д.) или более высоких порядков (выбор определяется целями исследователя).
В результате проверки адекватности модель может оказаться неадекватной вследствие того, что:
а) в нее включены не все факторы, существенно влияющие на процесс. В этом случае выбирают более полную модель и для определения ее параметров строят, реализуют и обрабатывают новую матрицу планирования;
б) не учтены эффекты взаимодействия разных факторов. Для их учета предполагаемые взаимодействия включают в модель и, если позволяет исходный план (число опытов не менее числа определяемых параметров новой модели), повторно обрабатывают результаты эксперимента. Если начальный план не дает возможности провести такую обработку (п < т), выполняют дополнительные опыты с расширенным планом (например, от полуреплики переходят к ПФЭ и т.п.), причем реализуются только те опыты, которые не входили в исходный план;
в) принятый порядок модели ниже требуемого. Для проверки необходимо расширить используемый композиционный план, включив опыты, обеспечивающие получение модели более высокого порядка. Если модель высшего порядка будет адекватной, то это предположение подтверждается.
При проведении эксперимента исследователь может предъявлять к математической модели различные требования: получение определенных оценок ее параметров; обеспечение желаемых предсказательных свойств и т. п. Это приводит к необходимости выбора спец. планов, подчиненных поставленным требованиям (критериям). Среди критериев, удовлетворяющих первому требованию, наиболее общим является D-критерий, соответствующий обобщенной дисперсии всех оценок параметров мат. модели. Кроме него применяют А-критерий, отвечающий средней дисперсии оценок параметров; Е-критерий, соответствующий длине макс. оси эллипсоида рассеяния оценок параметров; критерий ортогональности, обеспечивающий независимость определения параметров модели, и т.д. Среди критериев, удовлетворяющих второму требованию, особенно часто используют G-критерий, отвечающий макс. дисперсии предсказанных значений ф-ции отклика; Q-критерий, соответствующий среднему значению дисперсий предсказанных значений; критерий ротатабельности, отвечающий дисперсии оценки предсказанных значений отклика во всех точках, равноудаленных от центра плана, и др.
Планы, минимизирующие приведенные выше критерии, называют соответственно D-оптимальными, A-оптимальными и т.д. Как правило, не удается построить план, одновременно удовлетворяющий нескольким критериям. Исключение составляют линейные планы: например, планы ПФЭ и ДФЭ не только ортогональны и ротатабельны, но еще и D-, G-, А- и E-оптимальны. Поэтому, если цель исследования - построение некоторой описательной мат. модели, аппроксимирующей опытные данные, рекомендуют использовать планы, отвечающие D-критерию; если модель должна обладать наилучшими предсказательными свойствами, используют планы, соответствующие G- или Q-критерию. Если, наконец, цель эксперимента - поиск оптимальных условий функционирования объекта, часто применяют ротатабельные планы.
Экстремальные задачи имеют целью определить наилучшее значение целевой функции, в качестве которой принимают значение интересующей исследователя характеристики процесса. Такие задачи могут быть решены по крайней мере двумя способами: с построением и без построения математической модели.
Планирование эксперимента с построением математической модели процесса. На основе выбранного плана строят модель, отвечающую рассматриваемому отклику, и, используя ее, с помощью известных методов поиска экстремума находят значения факторов, при которых целевая функция, определенная по модели, будет экстремальной. Если найденные значения факторов, соответствующие экстремальной точке, лежат на границе примененного плана, область планирования либо смещается, либо расширяется и строится новая модель, после чего поиск экстремума повторяется. Задача считается решенной, если вычисленные координаты точки экстремума находятся внутри области, характеризуемой использованным планом.
На практике такой подход часто реализуют методом так называемого крутого восхождения (метод Бокса-Уилсона). Выбирают начальную точку, в окрестности которой проводят ПФЭ или ДФЭ (в зависимости от числа факторов); по его результатам рассчитывают параметры математической модели 1-го порядка. Если модель адекватна, с ее помощью определяют направление изменения факторов, соответствующее движению к экстремальному значению целевой функции в направлении градиента или антиградиента (соответственно при поиске максимума или минимума). Движение в выбранном направлении осуществляют с помощью последовательно выполняемых опытов и производят до тех пор, пока отклик изменяется желаемым образом. В найденной наилучшей (для выбранного направления) точке снова выполняют ПФЭ или ДФЭ и т.д. Изложенную процедуру повторяют до построения адекватной модели на каждом этапе. Неадекватность модели, полученной на очередном этапе, свидетельствует о том, что, возможно, достигнута область экстремума, в которой линейную модель уже нельзя использовать. Для уточнения положения экстремума в этой области можно применять модель 2-го порядка, построенную посредством соответствующих планов.
Непосредственный эксперимент на объекте (без построения модели). Стратегия проведения опытов определяется выбранным методом оптимизации. При этом значение целевой функции вычисляют не по модели, а находят непосредственно из опыта, выполненного в соответствующих условиях. Наиболее часто для поиска наилучшего значения целевой функции используют последовательный симплексный метод, метод Гаусса-Зейделя и т.п.
Построение диаграмм состав-свойство. Построение таких диаграмм - важная часть физико-химических исследований различных смесей. Для смесей, содержащих k компонентов, характерно наличие следующих ограничений:

Сумма концентраций компонентов смеси обычно нормируется, поэтому соотношение (8) имеет вид:

где xi-относительная концентрация i-го компонента смеси. При обработке результатов активного эксперимента выражение (9) определяет в n-мерном пространстве переменных xi область их допустимых изменений, называемую симплексом. Например, в случае трех переменных симплекс представляет собой равносторонний треугольник (рис. 2). Вершинам симплекса соответствуют чистые компоненты. Точки на границах симплекса (ребрах) отвечают бинарным смесям соответствующих пар компонентов. Любая точка внутри симплекса отвечает составу смеси, в которой присутствуют все три компонента (указанные точки отмечены на рис. 2 штриховкой). Для четырехкомпонентной смеси симплексом служит тетраэдр, грани которого - симплексы, соответствующие трехкомпонентным смесям, и т.д.
Согласно условию (9), упомянутые выше факторные эксперименты непригодны для построения диаграмм состав-свойство из-за невозможности независимого варьирования каждого фактора. На практике для построения таких моделей иногда применяют так называемые симплекс-решетчатые планы (планы Шеффе), представляющие собой набор точек, равномерно распределенных на границе и внутри симплекса. Эти планы обычно насыщены и могут быть композиционными; например, точки плана 1-го порядка входят во все последующей композиции. Предложены также насыщенные симплекс-центроидные планы, которые состоят из точек, расположенных в вершинах симплекса, серединах ребер, центрах граней различные размерности и в центре симплекса.
Адекватность моделей, построенных на основе симплекс-решетчатых и симплекс-центроидных планов, вследствие их насыщенности проверяют по результатам дополнительных опытов в так называемых контрольных точках. Их координаты целесообразно выбирать так, чтобы они могли быть использованы, если возникнет необходимость получения уточненной модели более высокого порядка.
Изучение объектов, характеризуемых наличием неоднородностей. В общем случае источники неоднородностей могут быть непрерывного или дискретного типа. Источники непрерывного типа характеризуются изменением свойств объекта (его дрейфом) во времени или по какой-либо другой переменной (напр., неравномерное старение катализатора по длине аппарата). В случае невысоких (по сравнению с продолжительностью проведения всех опытов эксперимента) скоростей дрейфа можно использовать обычные методы планирование эксперимента. При высоких скоростях дрейфа применяют спец. планы, построенные, например, на основе т. наз. ортогональных полиномов Чебышева и т. п.
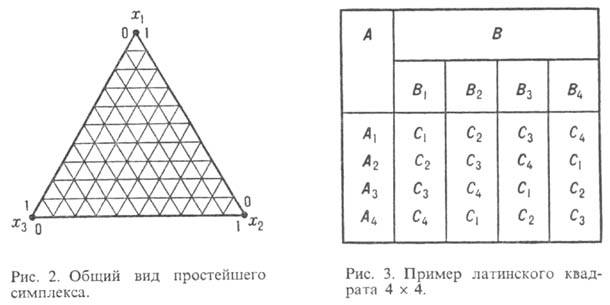
Источники дискретного типа: различие в сырье, технологических аппаратах, способах проведения процессов, исполнителях и т. д. В данном случае задача планирование эксперимента заключается в сокращении числа оцениваемых возможных сочетаний изучаемых факторов, т.е. относится к классу так называемых комбинаторных задач. Последние решают с помощью планов, основанных на специальных правилах размещения факторов по уровням в каждом опыте. Существует множество способов организации таких планов, из которых наиболее распространены планы, использующие свойства т. наз. латинских и греко-латинских квадратов, кубов и др. Например, латинский квадрат представляет собой таблицу, состоящую из n строк и n столбцов и заполненную n элементами (числами или буквами) так, что каждый элемент повторяется в каждой строке и каждом столбце только один раз (рис. 3).
Изучение кинетики и механизмов процессов связано, как правило, с разработкой так называемых детерминирующих моделей, отражающих физико-химическую сущность исследуемых явлений и содержащих описания механизмов (кинетики) протекающих в них элементарных процессов. Среди задач, решаемых методами планирования эксперимента, можно выделить: 1) определение (уточнение) параметров моделей; 2) т. наз. дискриминацию, т.е. отбрасывание проверяемых механизмов элементарных процессов.
Для уточнения параметров детерминирующиъ моделей необходимо выбрать такой план эксперимента, который обеспечит наилучшие оценки определяемых величин. Наиболее часто для этих целей используют, как указано выше, D-оптимальные планы. При уточнении параметров планирование эксперимента сталкиваются с рядом трудностей. К основным из них можно отнести: 1) необходимость иметь отдельный план для каждого класса моделей, то есть в каждой конкретной ситуации исследователь должен вычислить оптимальное расположение точек в факторном пространстве для постановки уточняющих экспериментов; 2) необходимость расчета параметров детерминирующих моделей с использованием методов оптимизации; это обусловлено обычно нелинейностью данных моделей относительно определяемых параметров.
Задача дискриминации заключается в выборе такой модели среди нескольких конкурирующих, которая наиболее правильно отражает механизм процесса и обладает наилучшей предсказательной способностью. Эта задача реализуется сопоставлением результатов оценки соответствия модели опытным данным при использовании различных описаний одного и того же процесса или явления. Самый простой метод дискриминации состоит в вычислении параметров каждой предложенной модели по экспериментальным данным и последующем сравнении остаточных дисперсий. В качестве выбранной модели принимают модель с минимальной остаточной дисперсией. Если не удается выбрать механизм, не противоречащий опытным данным, то либо расширяют исследуемую область, либо смещают расположение точек в факторном пространстве и операцию повторяют. Достоинство такого подхода заключается в том, что исследователь одновременно решает обе задачи - вычисление параметров и дискриминацию моделей. К недостаткам можно отнести то, что при этом часто требуются большие затраты времени на эксперименты и расчет параметров моделей.
Лит.: Налимов В. В., Чернова H. А., Статистические методы планирования экстремальных экспериментов, M., 1965; Хикс Ч. Р., Основные принципы планирования эксперимента. пер. с англ., M., 1967; Маркова E. В., Лисенков A. H., Планирование эксперимента в условиях неоднородностей, M., 1973; Зедгинидзе И. Г., Планирование эксперимента для исследования многокомпонентных систем, M., 1976; Адлер Ю. П., Маркова E. Б., Грановский Ю.В., Планирование эксперимента при поиске оптимальных условий, 2 изд., M., 1976; Рузинов Л. П., Слободчикова P. И., Планирование эксперимента в химии и химической технологии, M., 1980; Новик Ф. С., Арсов Я. Б., Оптимизация процессов технологии металлов методами планирования экспериментов, М.-София, 1980; Ахназарова С. Л., Кафаров В. В., Методы оптимизации эксперимента в химической технологии, 2 изд., M., 1985. Н. С. Кондаков.

 - среднее значение физической переменной, Dzj =
- среднее значение физической переменной, Dzj =  - интервал ее варьирования;
- интервал ее варьирования;  и
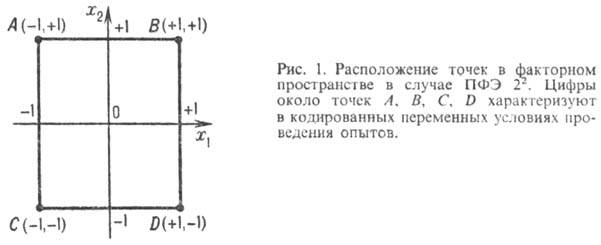
и  -макс. и миним. значения физ. переменной, которые м. б. заданы в опытах. При таком преобразовании значения всех хj или уровни факторов, изменяются в одинаковых пределах: от -1 до +1. Точка факторного пространства, отвечающая нулевым значениям факторов, наз. центром плана.
-макс. и миним. значения физ. переменной, которые м. б. заданы в опытах. При таком преобразовании значения всех хj или уровни факторов, изменяются в одинаковых пределах: от -1 до +1. Точка факторного пространства, отвечающая нулевым значениям факторов, наз. центром плана. 2-число выбранных уровней); при этом реализуются все возможные опыты, различающиеся значением хотя бы одного фактора. Число опытов в ПФЭ n = qm: напр., для m = 2 и q = 2 число n = 22 = 4 опыта.
2-число выбранных уровней); при этом реализуются все возможные опыты, различающиеся значением хотя бы одного фактора. Число опытов в ПФЭ n = qm: напр., для m = 2 и q = 2 число n = 22 = 4 опыта.

